Blair Johnson

CV -
Research -
Artifacts -
Travel
GitHub: Blair-Johnson
LinkedIn: in/blair-b-johnson
Email: blairjohnson at gatech dot edu
Last Updated: Nov. 2022
I am an incoming Ph.D. student studying machine learning in the Department of Electrical and Computer Engineering at the Georgia Institute of Technology starting in Jan. 2023. I conduct neuro-symbolic machine learning research as a full-time research engineer for the Information and Communications Laboratory within the Georgia Tech Research Institute.
Previously, I have worked as a deep learning research and development intern at the Intel Corporation under Dr. Nico Galoppo. I also had the pleasure of working on perception problems for CurbSide.ai, a startup company that sought to improve the safety of dockless electric vehicles. In my most recent position as a machine learning intern with SkinIO, I worked on improving the quality of mobile skin lesion imaging.
Research Interests
Robotic Perception: For robotic agents to solve the general problem of perception, they will need to develop world modeling capabilities that generalize beyond pattern recognition. Human perception is multimodal, compositional, contextual, and abstract. With sufficient experience, a single sensory input such as vision can support accurate estimation of object attributes ranging from part-whole hierarchies and contextual relationships to dynamics of motion and functionality. Humans can even theorize about the identity and function of previously unseen objects through mental and physical experimentation. This ability to infer rich, high-level representations from raw sensory data goes well beyond the traditional tasks of computer vision; it motivates the need for perception systems that can robustly extrapolate from observations to model the underlying phenomena governing our world.
Publications
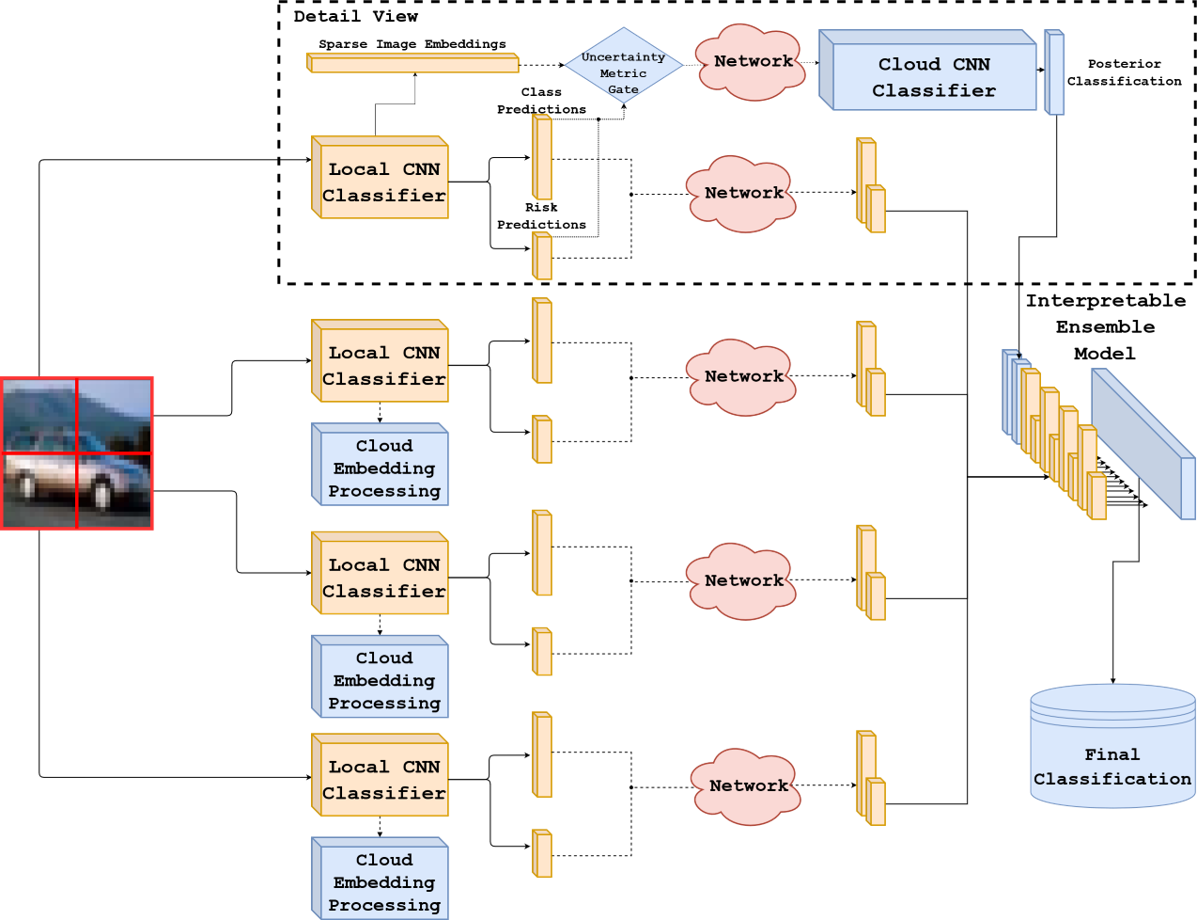
Risk-aware Triage to Attenuate Observational Uncertainty in Intelligence Environments
Blair Johnson*, Christine Herlihy*, Jason Poovey
GTRI IRAD Journal 2020